
Drones, or more commonly unmanned aerial vehicles (UAVs), represent the next frontier in Earth observation. The rise of UAVs has received much attention in the mainstream media, with many reports highlighting the transformative nature of this technology. Previously the predominant domain of military agencies, the recent availability of affordable enthusiast level systems has driven a revolution in this field of remote sensing. Areas as diverse as 3D mapping, search and rescue, spatial ecology and ecohydrology have taken advantage of this new observation platform. Of interest here is the potential of UAVs to provide information to drive advanced applications in agriculture, especially in the retrieval of vegetation information (phenology, health and stress), surface temperature and also in the estimation of crop water use.
To achieve these ambitious tasks, the Hydrology and Land Observation (HALO) group has invested in two distinct, but complementary, systems: a fixed wing (QuestUAV; http://www.questuav.com/) and a custom built quad-copter solution (FalconVIZ; http://www.falconviz.com/), which provide UAV capacity with replicate sensor packages. These different platforms offer complimentary features such as variable spatial resolution, vertical profiling, hovering and speed control. The quad-copter is a multi-rotor capable of carrying large payloads. The primary sensor packages includes a Tetracam multispectral camera (MiniMCA), a Headwall Photonics Nano-Hyperspec as well as an Optris thermal camera.

Figure 1. (left) a custom-designed quadcopter with a sensor load of just over 1 kg; and (right) the QuestUAV system. The UAVs carry a common sensor package comprising a SONY NEX-7 20MP digital camera, an Optris-Pi450 broadband thermal camera (7.5 to 13 µm) and a Tetracam MiniMCA that records 6 unique spectral bands across the VNIR (i.e. 490, 560, 665, 705, 740, 865 nm center wavelengths) and is configured to match those on Sentinel-2, a new satellite system launched in June 2015. We also have a Headwall Nano-Hyperspec installed on the quad.
Much of our reserach focus is directed towards the retrieval and estimation of vegetation parameters (phenology, stress and health) and crop water-use. This involves determining spatial patterns of metrics such as leaf-area index, but also includes the retrieval of plant pigments (chlorophyll and caretonoids) for integration into new modeling approaches.
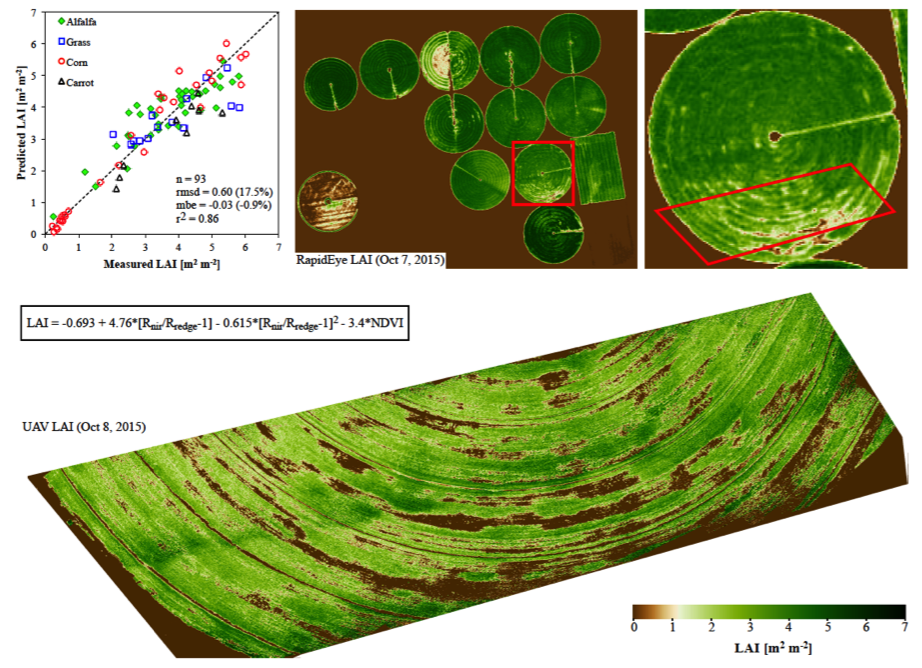
Figure 2. (left) High-resolution Rapideye data is used to derive leaf-area index from the tetracam on-board the UAV and (right) coincident mapping of thermal and multi-spectral VNIR data over an irrigated alfalfa field.
With parallel activities in space-based high-resolution remote sensing, we are also examining the spectral and spatial accuracy of remote sensing platforms during our field campaigns.
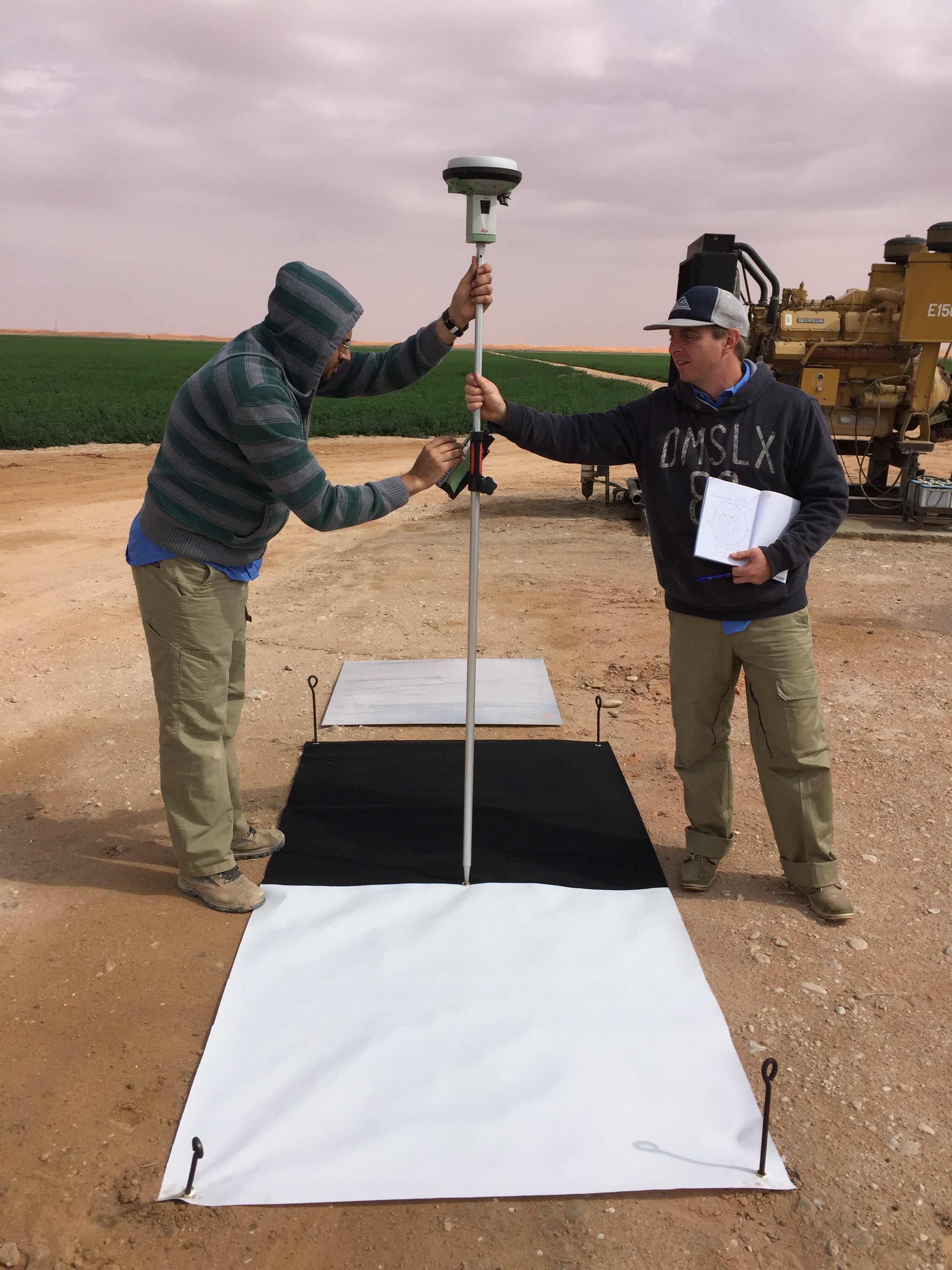
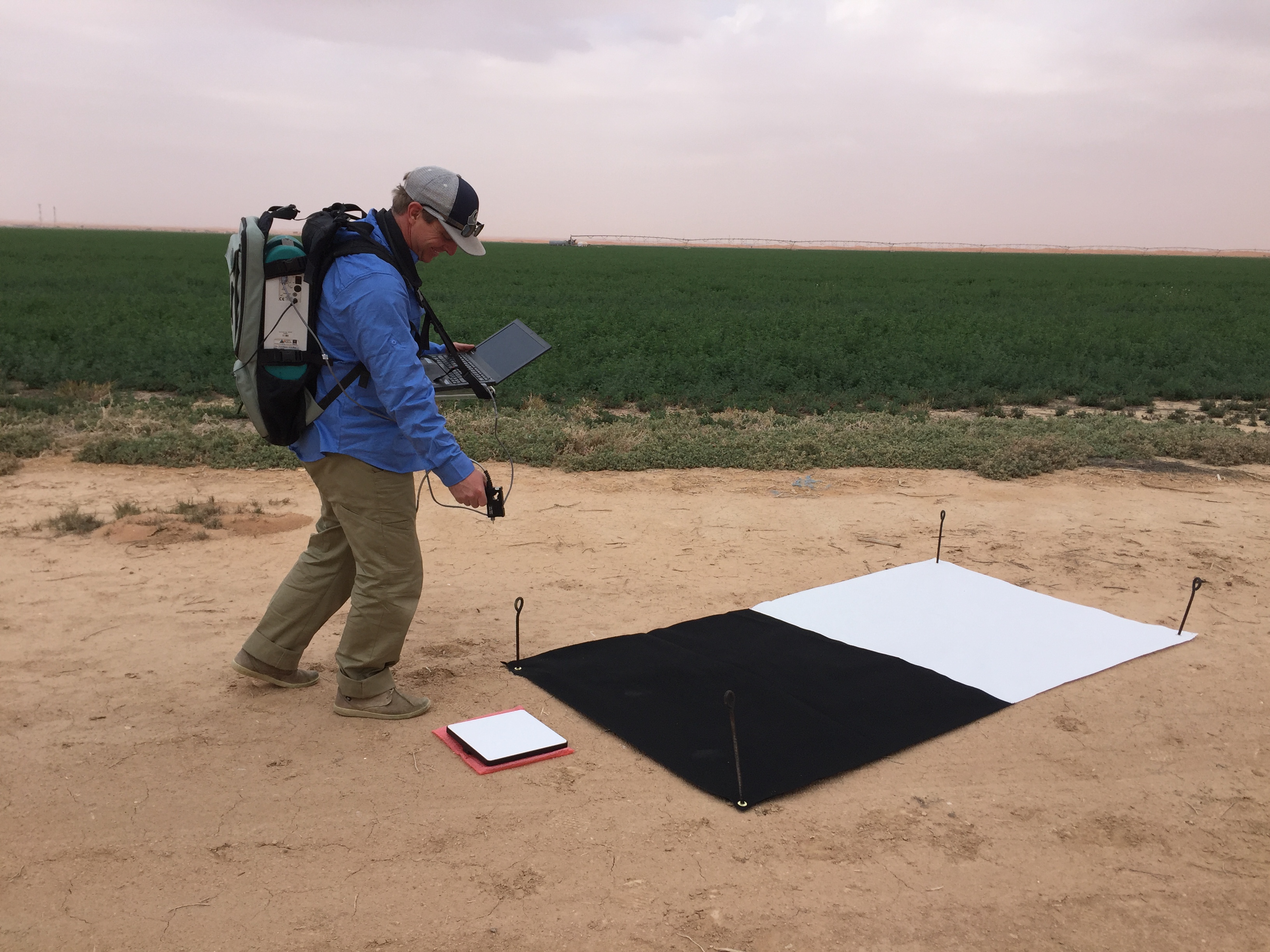
Figure 3. Samir (hooded) and Steve undertake GPS and spectral calibration of the UAV pre- and post-flight at the Tawdeehiya field.